Electrical Engineering ⇒ Topic : Rotor Equivalent Circuit
|
|
| Sachin
| |
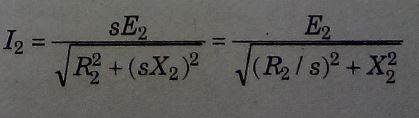
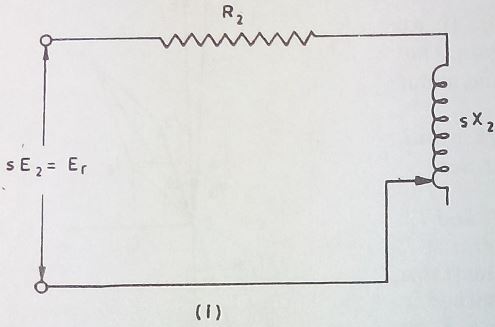
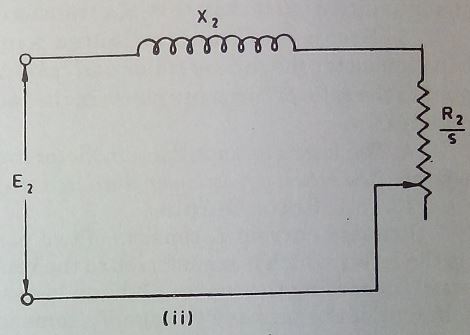
Equivalent Circuit of the Rotor:- The rotor current I2, when motor is loaded, is given by From the above relation it appears that the rotor circuit which actually consists of a fixed resistance R2, and a variable reactance sX2 (proportion.al to slip) connected across Er= sE2 [Fig. (i)] can looked upon as equivalent to a rotor circuit having a fixed reactance X, connected in series with a variable resistance R2s (inversely proportional to slip) and supplied with constant voltage E2 as shown in [Fig.(ii)]
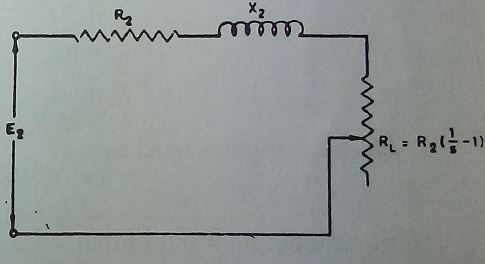
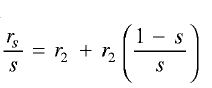
Figure (a) Equivalent circuit of a rotor. Also, the resistance R2/s can be written. as, It consists of two parts : (i) The part R2 is the rotor resistance itself and represents the rotor copper loss (ii) the second part is
Fig(b). Equivalent circuit of a rotor with load resistance RL In Fig.(b) is shown the equivalent rotor circuit along with the load resistance RL. | |
|
| |
| Samual
| |
Rotor Equivalent Circuit Figure (1) shows rotor equivalent circuit. The per phase rotor current is given by
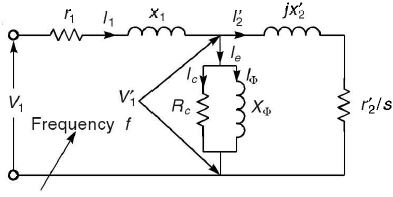
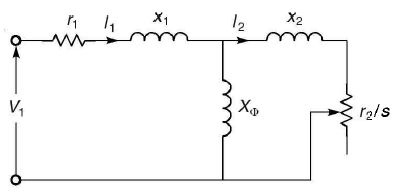
figure (1) Rotor circuit The complete equivalent circuit of induction motor is shown in Figure (2) where x'2 and r'2 are rotor leakage reactance and resistance referred to stator. figure (2) Complete equivalent circuit of three-phase induction motor If prime notation used for referred quantities is dropped, Figure 3 (a) shows the equivalent circuit of three-phase induction motor and Figure 3 (b) shows the modified form of induction motor equivalent circuit. From Figure 3 (b), For s = 1, Figure 3 (b) becomes the equivalent circuit of the two short-circuited winding transformers and for s = 0, Figure 3 (b) becomes equivalent circuit of an open-circuited transformer. figure (3) Equivalent circuit of induction motor In Figure 3 (b), r2 is the actual rotor resistance (referred to stator) whereas r2[(1 - s) /s] is the electrical analogue of the variable mechanical load. The use of exact equivalent circuit is quite tedious. So some simplifications should be made. In transformers, it is possible to draw the approximate equivalent circuit by moving the shunt branch across the primary terminals because the no-load current is 2% to 5% of full load current and per unit leakage reactance is low. In induction motor, the no-load current is 30% to 50% of full-load current and per unit leakage reactance is high. So considerable error will be introduced if the shunt branch is neglected or moved towards stator terminals. During normal operating condition of constant voltage and frequency, the core loss ininduction motor is usually constant. So the core loss resistance R, representing the motor core loss can be removed from the equivalent circuit. The equivalent circuit is redrawn in Figure (4). figure (4) Equivalent circuit of a three-phase induction motor without core loss In Figure (4), z is the per phase impedance offered to the stator by the rotating air-gap field. Impedance seen by the stator applied voltage is written as:
| |
|
| |
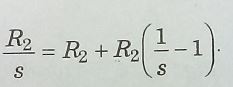
 This is known as load resistance R
This is known as load resistance R
 .............. (1)
.............. (1) .............. (2)
.............. (2)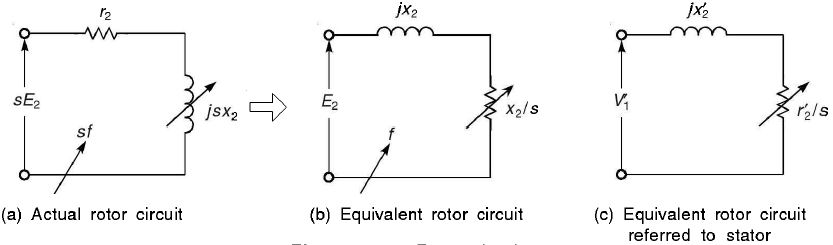
 ............ (3)
............ (3)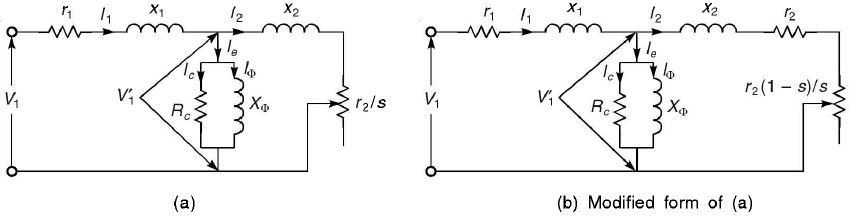
 ............ (4)
............ (4) ............... (5)
............... (5)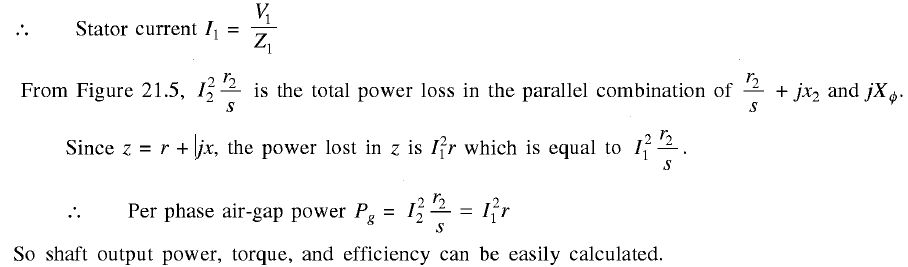
!! OOPS Login [Click here] is required for more results / answer