Electrical Engineering ⇒ Topic : Torque-slip Characteristics
|
|
| William
| |
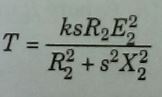
TORQUE-SLIP AND TORQUE-SPEED CURVES:- The expression for torque is as follows From the above expression it evident that : Torque is zero when slip 's' = 0 (i.e., speed is synchronous). When slip `,s' is very low the value of the term sX2 is very small and is negligible in comparison with R2, therefore torque T is approximately proportional to slip 's' if rotor resistance R2 is constant. This means that at speeds near to synchronous speed the torque-speed and torque-slip curves are approximately straight lines When the slip 's' increases (i.e., as, the speed decreases with increase in load) torque increases and reaches its maximum value when
Torque-speed curves Torque-slip curves When the slip is further increased the torque decreases. The result is that motor slows down and eventually stops. The motor operates for the value of slip between zero and that corresponding to maximum torque. With higher slip, R2 becomes negligible as compared to sX2 and torque varies as follows : This means that speed-torque or slip-torque curves are rectangular hyperbola with the speed or slip beyond, -that corresponding to maximum torque. Fig. show that the torque-speed and torque-slip curves for different values of rotor resistance. It is observed that although maximum torque is independent of rotor resistance R2, yet the exact location of Tmax is dependent on it. -Greater the R9, greater is the value of slip at which maximum torque occurs. | |
|
| |
| Samual
| |
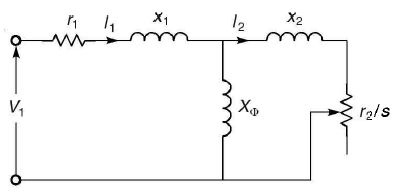
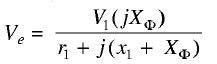
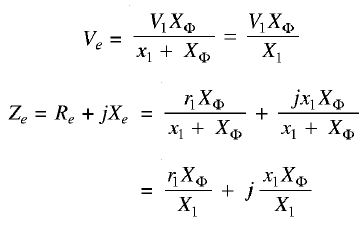
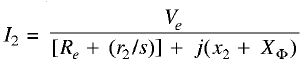
TORQUESLIP CHARACTERISTICS Figure (a) reduces to Figure (b) by using Thevenin's theorem Figure (a) Equivalent circuit of a three-phase induction motor without core loss figure (b) Thevenin's equivalent circuit X1 + XΦ, is much greater than r1 for most of the induction motors. So r1 can be neglected. Thus, Eqs. (1) and (2) become where X1 = x1 + XΦ, is the stator self reactance per phase. From Figure (b), the rotor current is given by Using Eq. (3), the torque is given by
Figure (c) shows the variation of torque with slip or speed of an induction motor. Figure (c) Torque-slip characteristic curve of an induction motor. The following are the three different modes of operation of an induction motor:
| |
|
| |
 The maximum torque is also known as 'pull-out' or 'break-down' torque.
The maximum torque is also known as 'pull-out' or 'break-down' torque.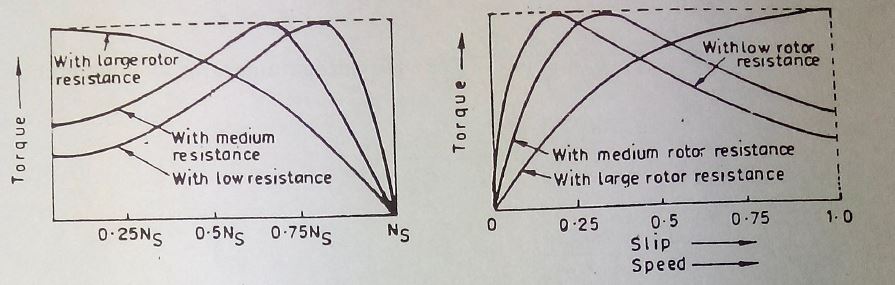

 .............. (1)
.............. (1)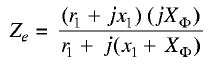 ............... (2)
............... (2)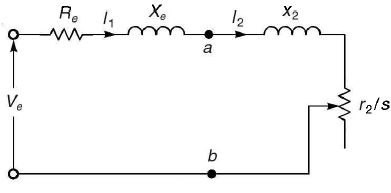
 .............. (3)
.............. (3) ............. (4)
............. (4)

!! OOPS Login [Click here] is required for more results / answer